1.1主流室内定位技术
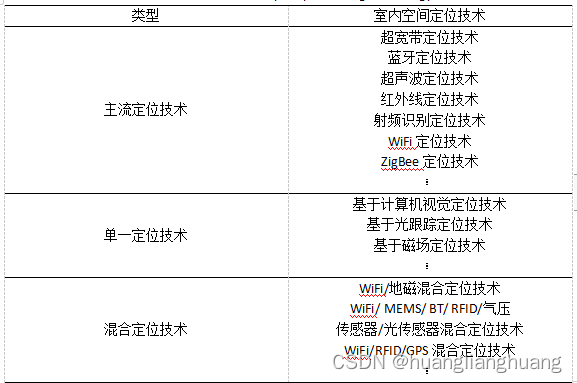
目前常见的室内空间定位技术如表1所示:
表一 室内空间定位技术
Table 1 Indoor space positioning technology
 微信号:guoguoma2727
微信号:guoguoma2727扫码免费领取用友软件使用权
复制微信号
1.1.1 超宽带定位技术
超宽带技术(ultra wide band, UWB)是近年来新兴一种传输数据速度快、发射能耗小、穿透力大、安全性好、基于极窄脉冲的无线技术。与传统通信不同的是,UWB不需载波,其是借助极窄脉冲来传输数据,因而其具有GHz量级的带宽。
UWB技术的物理特性使得其可以在无完全遮掩的复杂室内环境中实现高效精准定位。近年来,基于UWB 的空间定位技术在多个军民领域中实现了广泛应用。
1.1.2 蓝牙定位技术
蓝牙技术(Bluetooth)是一种数据传输距离短、功耗低的无线通信技术。蓝牙技术运用于定位时需要测量信号的强度信息,蓝牙室内定位系统设备具有体积小、易集成等特点,因此较容易推广应用。
蓝牙技术应用于室内环境下较短距离的定位时,信号的传输一般不受视距的影响。蓝牙技术最大的缺陷是信号传输距离短;此外,蓝牙定位网络建设的成本较大,且在复杂的定位环境下,定位的效果较差。综上,蓝牙定位技术适用于数据传输距离短、功耗小、环境相对简单、定位精度要求低的应用场景。
1.1.3 超声波定位技术
目前,超声波定位技术大都采用反射式的测距方法。目前,比较常用的基于超声波的室内空间定位大概有两种:一种为将超声波技术与射频识别技术结合进行定位,这种技术成本不高、能耗较低、定位精准;另一种为多超声波的空间定位技术,该技术的抗干扰能力强、定位精度高。
超声波定位技术的精度可达厘米级别,相对其他室内定位技术而言,精度较高;但超声波在信号传输过程中的衰减情况较为明显,因而会影响超声波定位的覆盖范围,且超声波定位易受环境干扰。综上,超声波定位技术适用于定位精度要求高、数据传输距离短、环境相对简单的应用场景中。
1.1.4 红外线定位技术
红外线是电磁波的一种,其波长介于无线电波和可见光波之间,在红外线应用于室内空间定位时,红外线的标识首先发射调制的红外射线,布设于室内空间的光学传感器可接收到红外射线,而后通过定位算法可实现定位。红外线定位技术可实现较高精度的室内定位,但是由于红外射线不能透过障碍物传播的性质,使得只能利用红外线定位技术在视距范围内定位。此外,红外线定位技术还有传输距离短的缺陷。综上,使得红外线定位技术在实际工程应用中的定位效果较差。
总体而言,红外线定位技术因其功耗较大、易受障碍物影响、传输距离短、定位复杂等缺点。在可用性和实用性上与其他定位技术有较大差距,在实际工程中应用较少。
1.1.5 射频识别定位技术
射频识别技术( radio frequency identification,RFID)是一种操控简易、适用于自动控制领域的技术。射频识别技术应用于识别和定位时主要通过射频的方式进行非接触式的双向通信。
射频识别定位技术的作用距离最长为几十米;其可在较短时间内得到厘米级定位精度的位置信息,且信号传输范围很大,定位系统成本较小。RFID定位设备相对稳定,且RFID定位终端、RFID标签的价格较低,所以可以进行大规模的推广使用。近年来,RFID定位技术在物资人员管控中有着成熟的应用和良好的使用前景。
1.1.6 WIFI定位技术
在无线局域网络(wireless local area networks,WLAN) 中,收集无线访问接入点 ( wireless access point,AP)或网卡处测得信号的强度信息,而后可通过匹配信号强度算法可实现多应用领域内复杂大空间环境中的定位、监察和追踪。WIFI技术由于在室内传输距离远、使用方便等优点,已成为无线以太网的一种室内定位解决方案。
目前,WIFI定位技术的覆盖范围有限,只适用于小空间范围内的室内定位,且较容易受到其他信号的干扰,从而影响其精度,且定位系统的能耗也较高。
1.1.7 ZigBee定位技术
ZigBee技术是一种新型的数据传输距离短、传输速率低的无线通信技术,也可以用于室内定位。
ZigBee 技术主要应用于无线个人区域网,其具有距离近、功耗小、成本低等特点,可以很好地满足室内空间定位系统的应用需求;此外ZigBee 定位技术对于网络稳定性的要求较高,且易受周围环境的影响。综上,ZigBee定位技术适用于网络稳定、环境简单、空间相对较小的室内空间定位场景。
1.1.8 其他室内定位技术
现如今,除了上述提及的室内空间定位技术外,还有基于计算机视觉、光跟踪定位、图像分析、磁场、信标定位的单一室内空间定位技术以及WIFI/ 地磁、WIFI/MEMS/BT/RFID/ 气压传感器/光传感器、WIFI/ RFID/ GPS等多源混合定位技术,这些技术大都处于研究试验阶段,稳定性和实用性都有待提高。
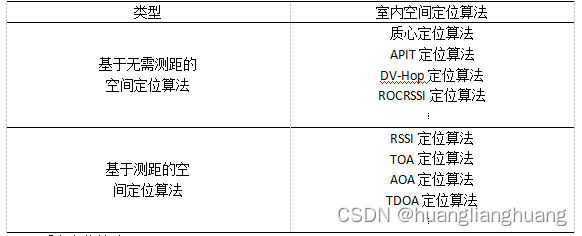
当前的室内空间定位技术所用的定位算法大致分为两类,如表2所示:
(1) 基于无需测距的空间定位算法,主要包括接近度定位和位置指纹匹配定位。此类定位算法是依靠待测点与锚节点的连通性进行场景分析进而得到位置信息。
(2) 基于测距的空间定位算法,主要包括测距离、测角度和测时差。此类定位算法是依
靠待测点与锚节点之间的距离或角度求取位置信息。
表 2 室内定位算法
Table 2 Indoor positioning algorithm
(1)质心定位算法。
质心定位算法的定位精度较为一般,且参考节点数对定位精度的影响较大,但质心定位算法的通信成本小。
(2)APIT定位算法。
APIT 定位算法的定位精度较为良好,且参考节点数对定位精度的影响较小,但APIT定位算法的通信成本是最大的。
(3)DV-Hop定位算法。
DV-Hop定位算法的定位精度较为良好,且DV-Hop 定位算法的通信成本较小,但参考节点数对定位精度的影响较大。
(4)ROCRSSI定位算法。
ROCRSSI定位算法的定位精度为最好,且ROCRSSI定位算法的通信成本为最小,但参考节点数对定位精度的影响较大。
(5)RSSI定位算法。
RSSI定位算法是已知在待测节点处接收到的信号的强度值,而后通过已知的距离损耗模型求取待测节点到参考节点的实际距离,最后,利用所求得的距离计算出待测节点的实际位置。
RSSI 定位算法与TOA、AOA、TDOA 等定位算法相比,不需要额外的硬件设备的支持,且比获得TOA、AOA、TDOA等定位算法的多径特征信息要较容易。
(6)TOA定位算法。
TOA定位算法在使用时需要已知至少三个参考节点的实际位置坐标信息。而后,通过测量信号从参考节点到待测节点所经历的时间进而求取待测节点的实际位置。
(7)AOA定位算法。
AOA定位算法是通过测量待测节点与参考节点之间的角度来求取待测节点的实际位置信息。
(8)TDOA定位算法。
在一定程度上,TDOA 定位算法可以看作TOA定位算法的改进版。
3.1 室内空间定位技术面临的挑战
实际的工程应用中,在设计室内空间定位的解决方案时,需要同时满足一些应用需求,包括:定位精度、覆盖范围、系统可靠性、定位成本、系统功耗、系统可扩展性和响应时间等。