 微信号:guoguoma2727
微信号:guoguoma2727扫码免费领取用友软件使用权
复制微信号

在室内一般GPS信号较弱或没有GPS信号。而GPS是告诉飞控,无人机的位置(相对于地的位置),也就是我们所说的GPS定位。目前主流的室内定位技术都在下面这幅图中。
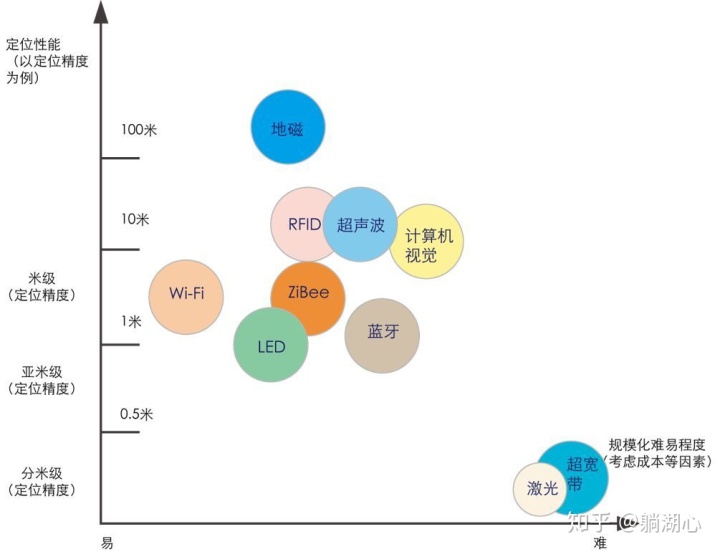
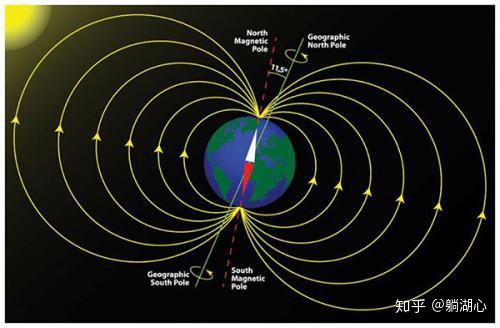
地磁定位
地磁定位作为一种新兴的室内定位方法,借助地球磁场强度在每个位置的唯一性实现定位功能,其优势在于安全可靠、成本低廉、对环境要求低等,只通过智能手机内置的地磁传感器即可实现定位,通常精度在2米以内。
室内地磁定位的不足:1、室内环境有较大的变动时需要重新采集地磁数据。
2、初始位置的获取较为困难。
3、地磁定位的稳定性相对较差,易受到金属物或室内环境变化的影响。
地磁定位的优势:1、无需部署额外的硬件,因此成本也较低。
2、地磁导航的误差不会随着时间产生累计效应。
Wi-Fi技术
通过无线接入点(包括无线路由器)组成的无线局域网络(WLAN),可以实现复杂环境中的定位、监测和追踪任务。它以网络节点(无线接入点)的位置信息为基础和前提,采用经验测试和信号传播模型相结合的方式,对已接入的移动设备进行位置定位,最高精确度大约在1米至20米之间。如果定位测算仅基于当前连接的Wi-Fi接入点,而不是参照周边Wi-Fi的信号强度合成图,则Wi-Fi定位就很容易存在误差(例如:定位楼层错误)。另外,Wi-Fi接入点通常都只能覆盖半径90米左右的区域,而且很容易受到其他信号的干扰,从而影响其精度,定位器的能耗也较高。
优点:1、定位精度较高,WIFI密集人流多的地方相当精确。
2、速度快。
3、周围WIFI无法连接也能定位。
缺点 :1、没有WIFI就无法定位。
2、必须处于联网状态。
3、密集部署。
4、需要打眼走线。

蓝牙技术
蓝牙通讯是一种短距离低功耗的无线传输技术,在室内安装适当的蓝牙局域网接入点后,将网络配置成基于多用户的基础网络连接模式,并保证蓝牙局域网接入点始终是这个微网络的主设备。这样通过检测信号强度就可以获得用户的位置信息。
蓝牙定位主要应用于小范围定位,例如:单层大厅或仓库。对于持有集成了蓝牙功能移动终端设备,只要设备的蓝牙功能开启,蓝牙室内定位系统就能够对其进行位置判断。
不过,对于复杂的空间环境,蓝牙定位系统的稳定性稍差,受噪声信号干扰大。
超宽带技术(UWB)
早期被用来应用在近距离高速数据传输,近年来国外开始利用其亚纳秒级超窄脉冲来做近距离精确室内定位。超宽带技术与传统通信技术的定位方法有较大差异,它不需要使用传统通信体制中的载波,而是通过发送和接收具有纳秒或纳秒级以下的非正弦波极窄脉冲来传输数据,可用于室内精确定位,例如:战场士兵的位置发现、机器人运动跟踪等。
超宽带系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能够提高精确定位精度等优点,通常用于室内移动物体的定位跟踪或导航。UWB高精度定位技术用于无人机室内定位的技术。UWB定位技术因为其高精度在室内定位技术中占有很高的名望,他能提供高达2厘米的三维定位精度完全满足无人机室内定位导航的要求。
计算机视觉
利用摄像机拍摄到该标志物信息进行图像处理,最后确定所在位置的方法。计算机视觉技术使计算机模拟人类的视觉过程,具有感受环境的能力和人类视觉功能的技术。图像处理、人工智能和模式识别等技术的综合。
RFID技术
RFID定位技术利用射频方式进行非接触式双向通信交换数据,实现移动设备识别和定位的目的。它可以在几毫秒内得到厘米级定位精度的信息,且传输范围大、成本较低;不过,由于以下问题未能解决,以RFID定位技术的适用范围受到局限。
1. RFID不便于整合到移动设备之中。
2. 作用距离短(一般最长为几十米)。
3. 用户的安全隐私保护。
4. 国际标准化。
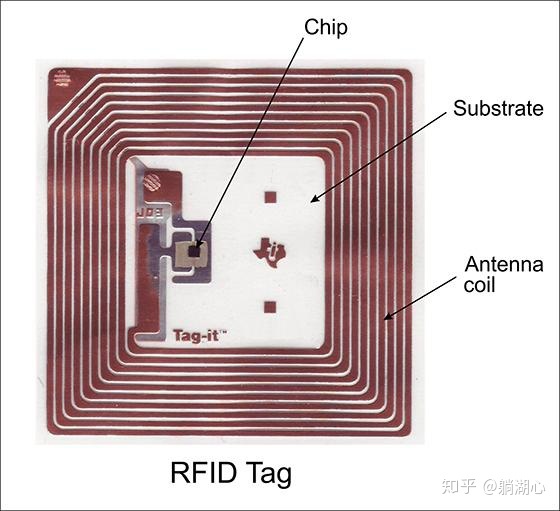
RFID的落地产品一圈圈围绕着的是天线,中间的是芯片,这是一款无源RFID电子标签。
ZigBee技术
ZigBee是一种短距离、低速率的无线网络技术。它介于RFID和蓝牙之间,可以通过传感器之间的相互协调通信进行设备的位置定位。这些传感器只需要很少的能量,以接力的方式通过无线电波将数据从一个传感器传到另一个传感器。ZigBee的技术特点:
1、低功耗,由于ZigBee的传输速率低,发射功率仅为1mW,而且采用了休眠模式,功耗低,因此ZigBee设备非常省电。据估算,ZigBee设备仅靠两节5号电池就可以维持长达6个月到2年左右的使用时间,这是其它无线设备望尘莫及的。
2、低成本, ZigBee模块的初始成本在6美元左右,估计很快就能降到1.5—2.5美元, 并且ZigBee协议是免专利费的。低成本对于ZigBee也是一个关键的因素。
3、时延短,典型的搜索设备时延在30ms,休眠激活时延时15ms。
4、网络容量大,一个星型结构的Zigbee网络最多可以容纳254个从设备和一个主设备, 一个区域内可以同时存在最多100个ZigBee网络, 而且网络组成灵活。
5、可靠,采取了碰撞避免策略,同时为需要固定带宽的通信业务预留了专用时隙,避开了发送数据的竞争和冲突。
6、安全,ZigBee提供了基于循环冗余校验(CRC)的数据包完整性检查功能,支持鉴权和认证, 采用了AES-128的加密算法,各个应用可以灵活确定其安全属性。
超声波技术
超声波定位主要采用反射式测距(发射超声波并接收由被测物产生的回波后,根据回波与发射波的时间差计算出两者之间的距离),并通过三角定位等算法确定物体的位置。
超声波定位整体定位精度较高(厘米级)、系统结构简单,但容易受多径效应和非视距传播的影响,降低定位精度;同时,它还需要大量的底层硬件设施投资,总体成本较高。
红外线技术
红外线技术室内定位是通过安装在室内的光学传感器,接收各移动设备(红外线IR标识)发射调制的红外射线进行定位,具有相对较高的室内定位精度。
但是,由于光线不能穿过障碍物,使得红外射线仅能视距传播,容易受其他灯光干扰,并且红外线的传输距离较短,使其室内定位的效果很差。当移动设备放置在口袋里或者被墙壁遮挡时,就不能正常工作,需要在每个房间、走廊安装接收天线,导致总体造价较高。
光流传感器
光流利用的是图像的变化处理,用于检测地面的状态,从而监测飞机的移动;主要用于保持飞机的水平位置,以及在室内实现定高和定点飞行。
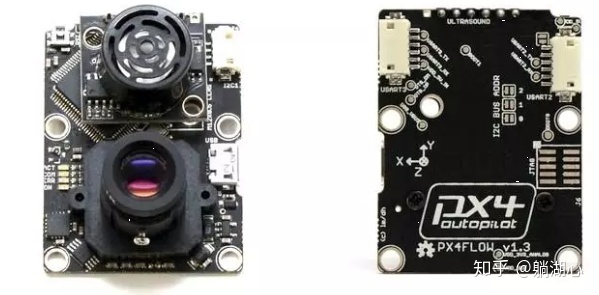
PX4Flow 是一款与Pixhawk飞控配套使用光流传感器。传感器拥有原生 752×480 像素分辨率,计算光学流的过程中采用了4倍分级和剪裁算法,计算速度达到250Hz(白天,室外),具备非常高的感光度。与其他滑鼠传感器不同,它可以以120Hz(黑暗,室内)的计算速度在室内或者室外暗光环境下工作,而无需照明LED。