一、Wi-Fi定位
Wi-Fi定位是目前相对成熟且应用广泛的定位技术,定位方法是基于信号强度的传播模型法和指纹识别法。信号强度的传播模型法,是指使用当前环境下假设的某种信道衰落模型,根据其数学关系估计终端与已知位置 AP 间的距离,如果用户听到多个 AP 信号,就可以通过三边定位算法来获得用户的位置信息;指纹识别法,则是基于 Wi-Fi 信号的传播特点,将多个 AP 的检测数据组合成指纹信息,通过与参考数据对比来估计移动物体可能的位置。
适用于医疗机构、主题公园、工厂、商场等各种需要定位导航的场合。
优点:覆盖领域多、WiFi普及率高、传输距离100米左右
痛点:
1、辐射:手机的辐射是瓦级的,WiFi是100毫瓦级的,而蓝牙是毫瓦级的,甚至更低。
2、功耗:wifi标签功耗较大,连续发射电流在200ma以上,电池寿命限制了wifi定位标签的推广使用。
3、存在严重的同频干扰问题,系统会相互影响。
 微信号:guoguoma2727
微信号:guoguoma2727扫码免费领取用友软件使用权
复制微信号
二、蓝牙定位
基于RSSI(Received Signal Strength Indication,信号场强指示)定位原理,根据定位端的不同,蓝牙定位方式分为网络侧定位和终端侧定位。网络侧定位系统由终端(手机等带低功耗蓝牙的终端)、蓝牙beacon节点,蓝牙网关,无线局域网及后端数据服务器构成;终端侧定位系统由终端设备(如嵌入SDK软件包的手机)和beacon组成。iBeacon根据定位端的不同,蓝牙定位方式分为网络侧定位和终端侧定位。是苹果推出的基站,iBeacon定位比起Wi-Fi定位的好处在于,可以支持iOS系统。
终端侧定位一般用于室内定位导航,精准位置营销等用户终端;而网络侧定位主要用于人员跟踪定位,资产定位及客流分析等情境之中。
优点:
1、实现简单,定位精度和蓝牙信标的铺设密度及发射功率有密切关系。
2、非常省电,可通过深度睡眠、免连接、协议简单等方式达到省电目的。
痛点:
1、距离:蓝牙的设计距离是10米以内,不能穿墙。
2、蓝牙普遍是点对点连接,多人多设备连接时很麻烦(几乎不可能)。
3、蓝牙没有路由的概念,无法遥控。
4、蓝牙系统稳定性较差,受噪声的干扰比较大。
三、超宽带UWB 定位
超宽带技术是近年新兴一项全新的、与传统通信技术有极大差异的通信无线新技术。UWB不同于传统的通信技术,它通过发送和接收具有纳秒或微秒级以下的极窄脉冲来实现无线传输的。由于脉冲时间宽度极短,因此可以实现频谱上的超宽带:使用的带宽在500MHz以上。
可用于各个领域的室内精确定位和导航,包括人和大型物品,例如贵重物品仓储、矿井人员定位、机器人运动跟踪、汽车地库停车等。
优点:
1、抗多径能力强,定位精度高:UWB的带宽很宽,多径分辨能力强,能够分辨并剔除大部分多径干扰信号的影响,得到精度很高的定位结果,更适用于室内定位。
2、时间戳精度高:超宽带脉冲信号的带宽在纳秒级,由定时来计算位置时,引入的误差通常小于几厘米。
3、电磁兼容性强:UWB 的发射功率低,信号带宽宽,能够很好地隐蔽在其它类型信号和环境噪声之中。
痛点:
1、技术门槛偏高,需要专网建设,网络部署复杂。
2、成本极高,一台基站4000~10000元左右,1个定位标签500元左右。

在众多技术当中,UWB作为新兴技术越来越流行。上图列出了历年微软室内定位比赛(MILC)比赛中基于基础设施组前三名的成绩。可以看出,从2015年开始,UWB的优势逐渐显示出来,已成为高精度定位技术中最有前景的技术。
四、射频识别RFID定位
基本原理是,通过一组固定的阅读器读取目标RFID标签的特征信息(如身份ID、接收信号强度等),同样可以采用近邻法、多边定位法、接收信号强度等方法确定标签所在位置。
优点:标识的体积比较小,造价比较低。
痛点:作用距离近,不具有通信能力;不便于整合到其他系统之中;无法做到精准定位,布设读卡器和天线需要有大量的工程实践经验难度大。
五、激光定位
激光是用测距来定位的,就是发射一个激光信号,根据收到从物体反射回来的信号的时间差来计算这段距离,然后根据发射激光的角度来确定物体和发射器的角度,从而得出物体与发射器的相对位置。
六、超声波定位
超声波定位目前大多数采用反射式测距法。系统由一个主测距器和若干个电子标签组成,主测距器可放置于移动机器人本体上,各个电子标签放置于室内空间的固定位置。
优点:超声波定位精度可达厘米级,精度比较高;有一定的穿透性而且超声波本身具有很强的抗干扰能力。
痛点:超声波在传输过程中衰减明显从而影响其定位有效范围。
七、红外技术
红外线是一种波长在无线电波和可见光波之间的电磁波。红外定位主要有两种具体实现方法,一种是将定位对象附上一个会发射红外线的电子标签,通过室内安放的多个红外传感器测量信号源的距离或角度,从而计算出对象所在的位置。
优点:空旷的室内容易实现较高精度;不需要定位对象携带任何终端或标签,隐蔽性强。
痛点:红外很容易被障碍物遮挡,传输距离也不长,因此需要大量密集部署传感器,造成较高的硬件和施工成本;红外易受热源、灯光等干扰,造成定位精度和准确度下降。
八、磁场定位
室内地磁定位的原理是如果建筑物本身不发生钢筋体的结构性改变,室内磁场的特性也就固定不变。通过手机端普遍集成的地磁传感器去收集室内的磁场数据,辨认室内环境里不同位置的磁场信号强度差异,从而匹配自己在空间中的相对位置。
优点:无硬件低成本;无累积误差。
痛点:每当室内环境有较大的变动就需要重新对现场地磁数据进行采集更新;地磁信号本身是容易受到金属物、磁性设备的干扰;初始位置的获取,需要持续行走5-8米左右,这给部分场景带来了一些限制。
九、惯性导航技术
利用终端惯性传感器采集的运动数据,如加速度传感器、陀螺仪等测量物体的速度、方向、加速度等信息,基于航位推测法,经过各种运算得到物体的位置信息。是一种非常棒的辅助定位技术。
优点:惯导计算十分简单;不需要外部器械辅助。
痛点:传感器的误差;环境的影响;步长推算的误差;系统自身还不具备自我纠正的能力。
十、总结
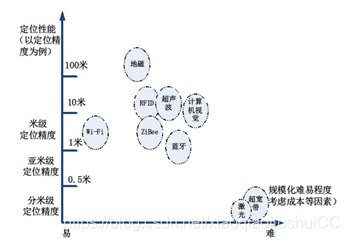
以上众多的室内定位技术都各自存在其优缺点。下图以其难易程度和定位精度为横纵坐标,展示了各个定位技术的优缺点。从图中可以看出,WIFI的定位级别为米级,同时由于WiFi的普遍性容易实施;蓝牙适合于点对点对接,无法适用于要求多点对接的场景;激光技术和UWB定位精度为分米级别,但是却难易规模化实现,技术门槛较高且成本较大;地磁由于容易受到外界因素的影响,定位精度较低。
当然对于室内定位的研究并不是局限于单一的技术,更多的情况是将多种技术有效结合起来以达到更好的效果。