抄于:http://www.ubitraq.com/html/docs_one.html 作者:都延星
 微信号:guoguoma2727
微信号:guoguoma2727扫码免费领取用友软件使用权
复制微信号
一、室内定位的源起和现状
室内定位,顾名思义,是与室外定位相对而言的。
室外定位技术及应用早已走入我们大家的日常生活,从汽车导航、手机地图APP到各式各样的LBS(Location-Based Service基于位置的服务)应用,例如:滴滴打车、大众点评、百度外卖等。打开这类APP后的第一步,系统都会自动定位我们的位置。
室外定位技术以GPS为主,手机通信基站定位为辅(也叫A-GPS,即Assisted辅助的GPS)。但在室内,GPS信号会受建筑物的遮挡而严重衰减和反射,几乎不可用。另一方面,民用GPS的水平面定位精度一般为5~10米,这个定位精度用于室外导航够用,但用于室内定位并不能满足所有场景的需求。想象下,有些店铺/房间的整体宽度还不到5米。而手机通信基站虽然在室内仍有信号,但其定位精度太低(上百米)无法满足室内场景的需求。所以传统室外定位技术在室内基本不可用。
据有关统计,人的一生80%以上的时间在室内,移动通信服务80%发生在室内,80%的信息与时间和位置有关,想必室内定位也具有做大的潜力。正是看好这个方向,从2011年前后开始,国际、国内众多室内定位创业公司如雨后春笋般出现,顶级互联网公司也开始布局室内定位技术。

然而,后来一切进展的并不顺利。到现在2016年下半年已经有几年时间过去了,室内定位应用似乎并没有走进大家的生活。手机地图APP在大型购物中心里还是不好用,人们在停车场依然要费劲才能找到自己的车。近日,笔者在北京IT公司聚集地附近的清河华润五彩城购物中心实地测试室内定位的效果。用Android手机打开百度地图APP进行室内定位测试,下图是笔者在同一点(红圈)进行三次定位得到的结果(蓝圈范围),可以看到定位结果很不稳定,甚至时常会把我定位到购物中心的外面。换成高德地图(被阿里收购)、腾讯地图,换成其它购物中心,效果都类似。用IOS手机则定位效果更差(原因后文会讲)。定位不稳定、结果不可信,造成室内定位应用不能进入大众生活,相关生态也无法建立。笔者觉得这里恰好隐藏着很大的机会。

二、主流室内定位技术介绍
当前室内定位技术主要有:WIFI、蓝牙、IMU(惯性导航)、LED、地磁、视觉、激光、UWB(超宽带)、超声波等。
这些定位技术各自有不同的特点:有些可以直接用于手机定位,有些不行;有些需要预先在室内搭建定位基站(例如WIFI AP),有些不需要;有些成本昂贵,有些几乎无额外成本;有些定位精确到毫米,有些比较粗犷;有些对环境适应性很广(室外室内、白天黑夜),有些对环境有特定要求。
笔者将常用的室内定位技术原理分为下文几类。还有一些应用较少的技术,不再赘述。
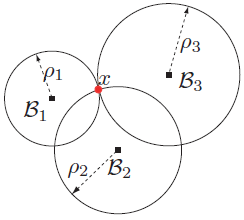
已知待定位终端(如手机)分别到n个已知位置的基站(如固定在室内屋角)距离,那么分别以每个基站为圆心,以终端到该基站距离为半径,可画出n个圆,这n个圆的交点位置就是手机的位置。n为3可以定出终端在二维平面上的位置;n为4可定出基站在三维空间的位置。这就是三边定位的基本原理,如下图所示。
所以,定位问题最终转化为终端和基站间的测距问题,而测距精度决定了最终的定位精度。实际上,很多室内定位技术的差异,就体现在用什么方法来测距。一种常见方法是用射频信号的飞行时间来测距(距离=单程飞行时间x光速)。
典型技术:WIFI、蓝牙、UWB定位等。
预先测试和记录室内环境中不同点的某物理特征值,存入数据库。待定位时,先测量当前位置的特征值,然后与数据库比对,定位出最可能在的位置。
典型技术:地磁、WIFI指纹。前者利用建筑物内不同点的磁场特性有区别的特点;后者储存室内场所中多个WIFI AP在所有位置的WIFI RSSI值待比对。
通过(手机)摄像头拍摄周边场景,或通过激光传感器对周边环境扫描建模,然后和数据库中预先储存的图像进行比对,确定当前所在位置。
典型技术:视觉、激光。
下面笔者对各种主流室内定位技术方案分别做详细介绍:
1. WIFI定位按定位原理不同,分为三边定位和指纹定位两种。
在WIFI三边定位方案中,因为复杂度的原因,并没有采用飞行时间法测距,而是先测量终端的RSSI(Received Signal Strength Indication接收信号强度),再根据RSSI和距离的关系公式来估算距离。而无论这个关系公式本身,还是RSSI的测量,都有较大误差,最终造成WIFI定位精度较低。即便在某固定点连续两次测量RSSI,测量值也会有不同,更换不同的手机也会有差异,且基站和终端的距离越远,距离测量误差越大。所以一般要提高WIFI定位精度,往往要提高基站的部署密度。
2. 蓝牙定位蓝牙定位主要基于三边定位的原理。与WIFI定位类似,蓝牙定位通常也采用测量蓝牙RSSI来推算距离,因而也存在测量误差大的劣势。
蓝牙4.0(BLE - Bluetooth Low Energy)的低功耗特性和苹果的iBeacon发布,大大推动了蓝牙技术在室内定位领域的应用。因为iBeacon(即BLE基站)低功耗无源(仅靠一节纽扣电池供电一年以上,不用外接电源)、成本低廉(一个iBeacon可以小于50元),所以iBeacon可以远比WIFI AP部署的密度高,例如间隔8米部署一个。因为部署密度高,带来的直接优势是蓝牙定位精度可以比WIFI高(因为RSSI与距离的对应关系中,距离越近约精确,越远误差越大);带来的直接缺点就是总体部署成本较高,后续维护成本也较高。
3. LED定位利用加速度计+陀螺仪等惯性传感器,记录进入室内后的动作,完成定位。因为存在难以避免的累积误差,运动越久累积误差越大,所以这种方法很少独立用于室内定位。通常IMU定位作为多传感器融合定位的重要内容,与其它定位方式(例如WIFI、蓝牙等)配合使用。例如在能接收到蓝牙beacon的有效信号时,以蓝牙定位为准,否则以IMU定位为准,当蓝牙定位有效时同步对IMU进行误差归0校准。
5. 地磁现代建筑使用的钢筋混凝土等结构会对地磁场造成扰动,导致室内各个位置的地磁特性各不相同。地磁定位技术,通过测量室内某位置的地磁场,与预先人工采集的室内磁场分布数据库做比对,从而大致判断所处位置。
6. 超声波超声波定位技术通过在室内安装多个超声波扬声器,发出能被定位终端麦克风检测到的超声波信号。通过不同声波的到达时间差,推测出终端的位置。
7. 激光雷达激光雷达(h5DAR)通过自身旋转进行水平或竖直平面的激光扫描。发射激光到目标,接收反射信号,计算飞行时间,从而精确测距。
8. UWB(Ultra-Wideband超宽带) 9. 视觉用手机摄像头或双目摄像头拍摄周边画面,并和已经预先储存的环境图像进行匹配,确定自己的位置。
三边定位法(也有叫三角定位)
指纹法
图像匹配
定位精度:典型5米。WIFI指纹定位的精度比三边定位略高些。
优点
可以直接用手机定位。
可以部分共享室内现有的WIFI AP,部署成本较低。
缺点
苹果已经在IOS上关闭了WIFI RSSI读取接口,造成IOS手机不能主动使用WIFI定位。
满足上网需求和满足定位需求对WIFI AP的布置要求是有些区别的。例如房间内只要有一个AP就能上网,但此时是不能准确定位的;而一旦增加AP的数量用于定位,不仅要多花钱,也会造成多个WIFI的互相干扰,反而不利于上网。所以,WIFI定位方案部署成本低的优势,实际是要打个折扣的。
因为WIFI AP的性能限制,通常可同时定位的终端数量较少,一般